This simple project shows how to control popular and cheap stepper motor 28BYJ-48 using ATtiny13. The code is on Github, click here.
Parts Required
- ATtiny13 – i.e. MBAVR-1 development board
- stepper motor 28BYJ-48 with driver on ULN2003
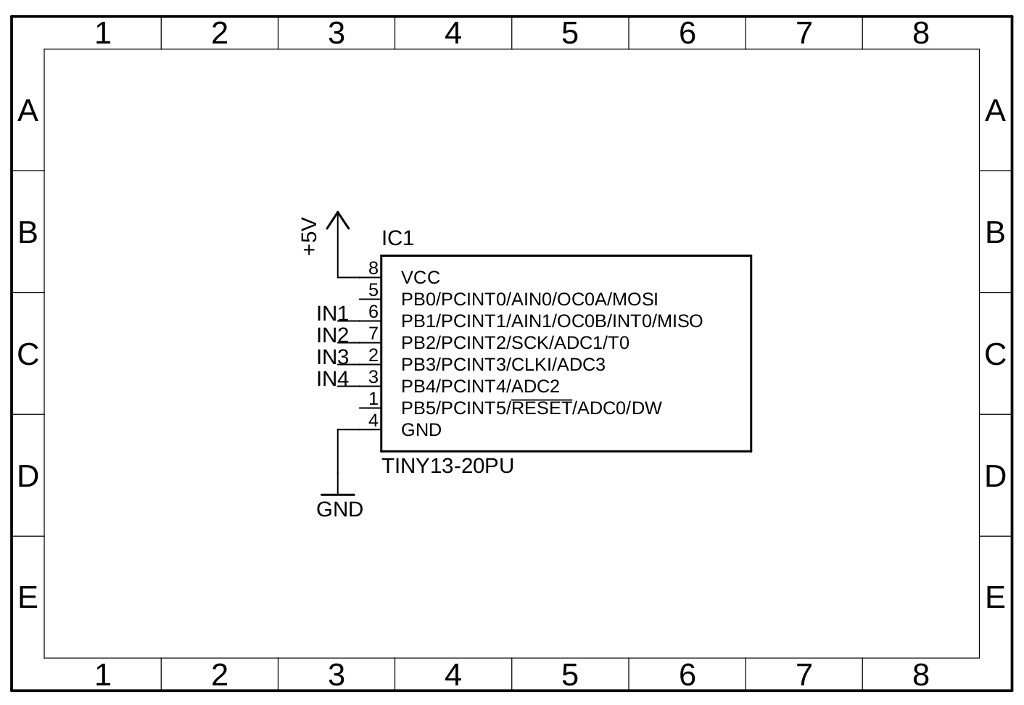
Circuit Diagram
Software
This code is written in C and can be compiled using the avr-gcc. All information about how to compile this project is here.
/**
* Copyright (c) 2019, Łukasz Marcin Podkalicki <lpodkalicki@gmail.com>
* ATtiny13/047
* Simple stepper motor (28BYJ-48) controller.
* Key features:
* -> move on one step,
* -> set direction,
* -> 4096 steps per revolution,
* -> 0.087890625° per step,
* -> frequency 100Hz.
*/
#include <avr/io.h>
#include <util/delay.h>
#define IN1 PB1
#define IN2 PB2
#define IN3 PB3
#define IN4 PB4
#define SET(pin) (PORTB |= _BV(pin))
#define CLR(pin) (PORTB &= ~_BV(pin))
static int8_t _dir = 1;
static int8_t _seq = 0;
static void
stepper_init(void)
{
/* set step motor pins as OUTPUT */
DDRB |= _BV(IN1)|_BV(IN2)|_BV(IN3)|_BV(IN4);
}
/* Set direction (1 - clock wise, 0 - counter clock wise) */
static void
stepper_dir(uint8_t dir)
{
_dir = !!(dir);
}
/* Move on one step (100Hz) */
static void
stepper_move(void)
{
_seq = (_seq + (_dir?1:-1)) & 7;
switch (_seq) {
/* Pattern for 8 microsteps: A-AB-B-BC-C-CD-D-DA */
/* [ A ][ B ][ C ][ D ] */
case 0: SET(IN1);CLR(IN2);CLR(IN3);CLR(IN4);break;
case 1: SET(IN1);SET(IN2);CLR(IN3);CLR(IN4);break;
case 2: CLR(IN1);SET(IN2);CLR(IN3);CLR(IN4);break;
case 3: CLR(IN1);SET(IN2);SET(IN3);CLR(IN4);break;
case 4: CLR(IN1);CLR(IN2);SET(IN3);CLR(IN4);break;
case 5: CLR(IN1);CLR(IN2);SET(IN3);SET(IN4);break;
case 6: CLR(IN1);CLR(IN2);CLR(IN3);SET(IN4);break;
case 7: SET(IN1);CLR(IN2);CLR(IN3);SET(IN4);break;
}
_delay_ms(1); // 100Hz
}
int
main(void)
{
uint8_t dir = 1;
uint16_t step = 0;
/* setup */
stepper_init();
/* loop */
while (1) {
stepper_dir(dir ^= 1);
for (step = 0; step < 4096; ++step) {
stepper_move(); // 1 step (1/4096)
}
}
}
Request Pattern for 4 microsteps.thanks